 Many processes require a dynamic point-to-point reversal movement or a point-accurate smoothing.
Many processes require a dynamic point-to-point reversal movement or a point-accurate smoothing.
With our approach of Linear Splines for motion and our numerical solver methods, a highly dynamic, precise movement can be achieved.
 Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube. PGRpdiBjbGFzcz0iX2JybGJzLWZsdWlkLXdpZHRoLXZpZGVvLXdyYXBwZXIiPjxpZnJhbWUgd2lkdGg9IjU2MCIgaGVpZ2h0PSIzMTUiIHNyYz0iaHR0cHM6Ly93d3cueW91dHViZS1ub2Nvb2tpZS5jb20vZW1iZWQvdldkaVVkdkhvQXM/cmVsPTAmYW1wO3ZxPWhkMTA4MCIgZnJhbWVib3JkZXI9IjAiIGFsbG93PSJhdXRvcGxheTsgZW5jcnlwdGVkLW1lZGlhIiBhbGxvd2Z1bGxzY3JlZW49IiI+PC9pZnJhbWU+PC9kaXY+ |
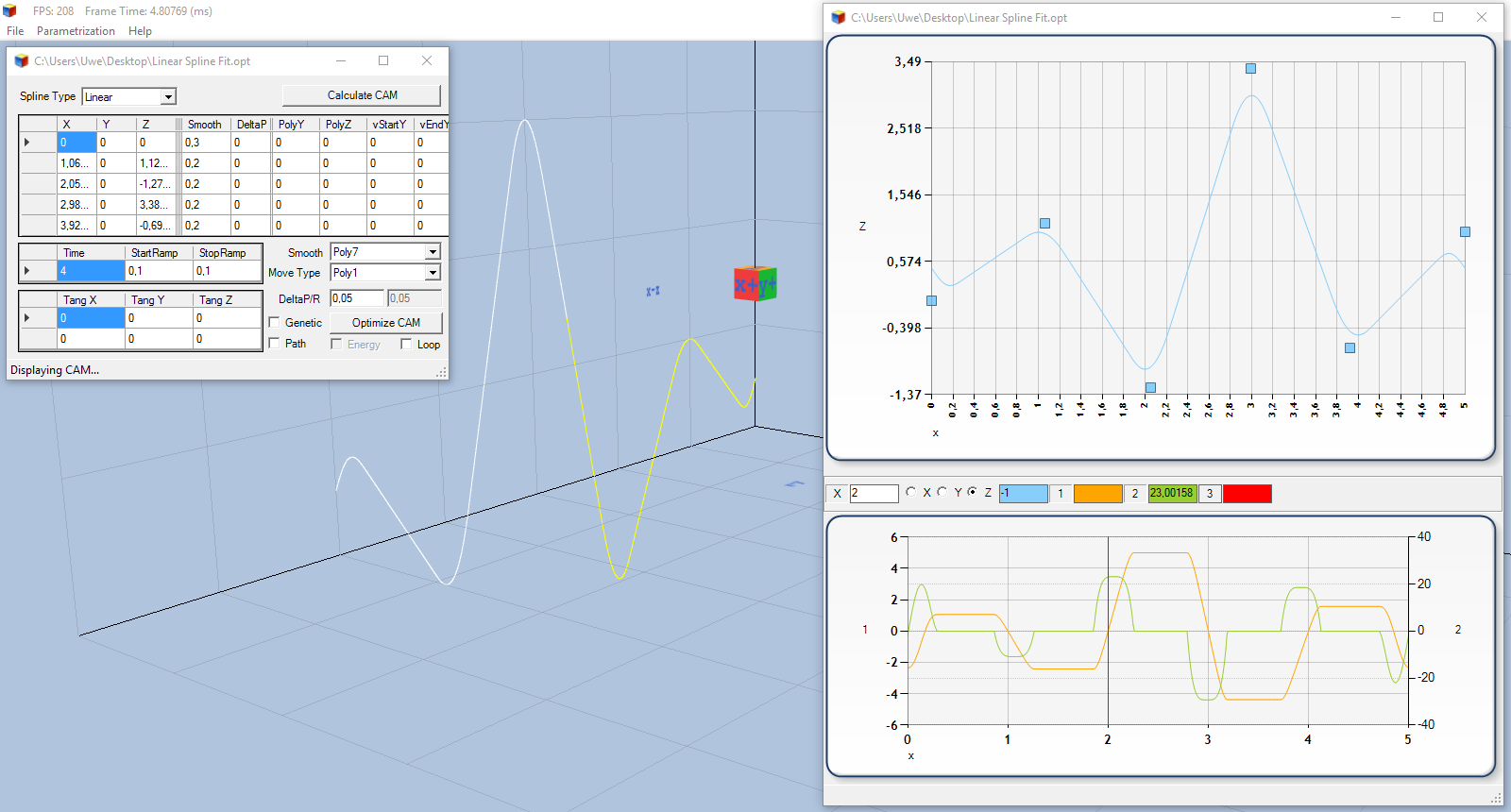
The video illustrates how a Linear Spline is simply defined via the four center reversal points (1, 1) (2, -1) (3, 3) and (4, -0.5) and this is then automatically modified so that over these reversal points is driven very dynamically. It is not necessary to stop at the reversal points, but the velocity (orange) has a zero crossing. In addition, one can also see that the acceleration (green), modeled with a polynomial of the degree 7, is capped at the respective maximum.
For further handling, the resulting Linear Spline with smoothing polynomials can be easily mapped to every common motion control system as a cam, so that no special manufacturer-dependent operating system is necessary.