When reducing energy consumption for a robot, we can optimize the robot path. This already leads to savings in a double-digit range.
 Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube. PGRpdiBjbGFzcz0iX2JybGJzLWZsdWlkLXdpZHRoLXZpZGVvLXdyYXBwZXIiPjxpZnJhbWUgd2lkdGg9IjU2MCIgaGVpZ2h0PSIzMTUiIHNyYz0iaHR0cHM6Ly93d3cueW91dHViZS1ub2Nvb2tpZS5jb20vZW1iZWQvbjdGZWczTEVJM2c/cmVsPTAmIzAzODt2cT1oZDEwODAiIGZyYW1lYm9yZGVyPSIwIiBhbGxvdz0iYXV0b3BsYXk7IGVuY3J5cHRlZC1tZWRpYSIgYWxsb3dmdWxsc2NyZWVuPjwvaWZyYW1lPjwvZGl2Pg== |
If the robot path could not be changed, we perhaps still can think of positioning the robot elsewhere. This also leads to savings in a double-digit range.
|
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube. PGRpdiBjbGFzcz0iX2JybGJzLWZsdWlkLXdpZHRoLXZpZGVvLXdyYXBwZXIiPjxpZnJhbWUgd2lkdGg9IjU2MCIgaGVpZ2h0PSIzMTUiIHNyYz0iaHR0cHM6Ly93d3cueW91dHViZS1ub2Nvb2tpZS5jb20vZW1iZWQvbjF6S0daUFBpRkU/cmVsPTAmIzAzODt2cT1oZDEwODAiIGZyYW1lYm9yZGVyPSIwIiBhbGxvdz0iYXV0b3BsYXk7IGVuY3J5cHRlZC1tZWRpYSIgYWxsb3dmdWxsc2NyZWVuPjwvaWZyYW1lPjwvZGl2Pg== |
Having freedom in both the robot path as well as the robot standpoint, we have even the chance to halve energy consumption.
|
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube. PGRpdiBjbGFzcz0iX2JybGJzLWZsdWlkLXdpZHRoLXZpZGVvLXdyYXBwZXIiPjxpZnJhbWUgd2lkdGg9IjU2MCIgaGVpZ2h0PSIzMTUiIHNyYz0iaHR0cHM6Ly93d3cueW91dHViZS1ub2Nvb2tpZS5jb20vZW1iZWQvVGpfN1BWRndnbEE/cmVsPTAmIzAzODt2cT1oZDEwODAiIGZyYW1lYm9yZGVyPSIwIiBhbGxvdz0iYXV0b3BsYXk7IGVuY3J5cHRlZC1tZWRpYSIgYWxsb3dmdWxsc2NyZWVuPjwvaWZyYW1lPjwvZGl2Pg== |
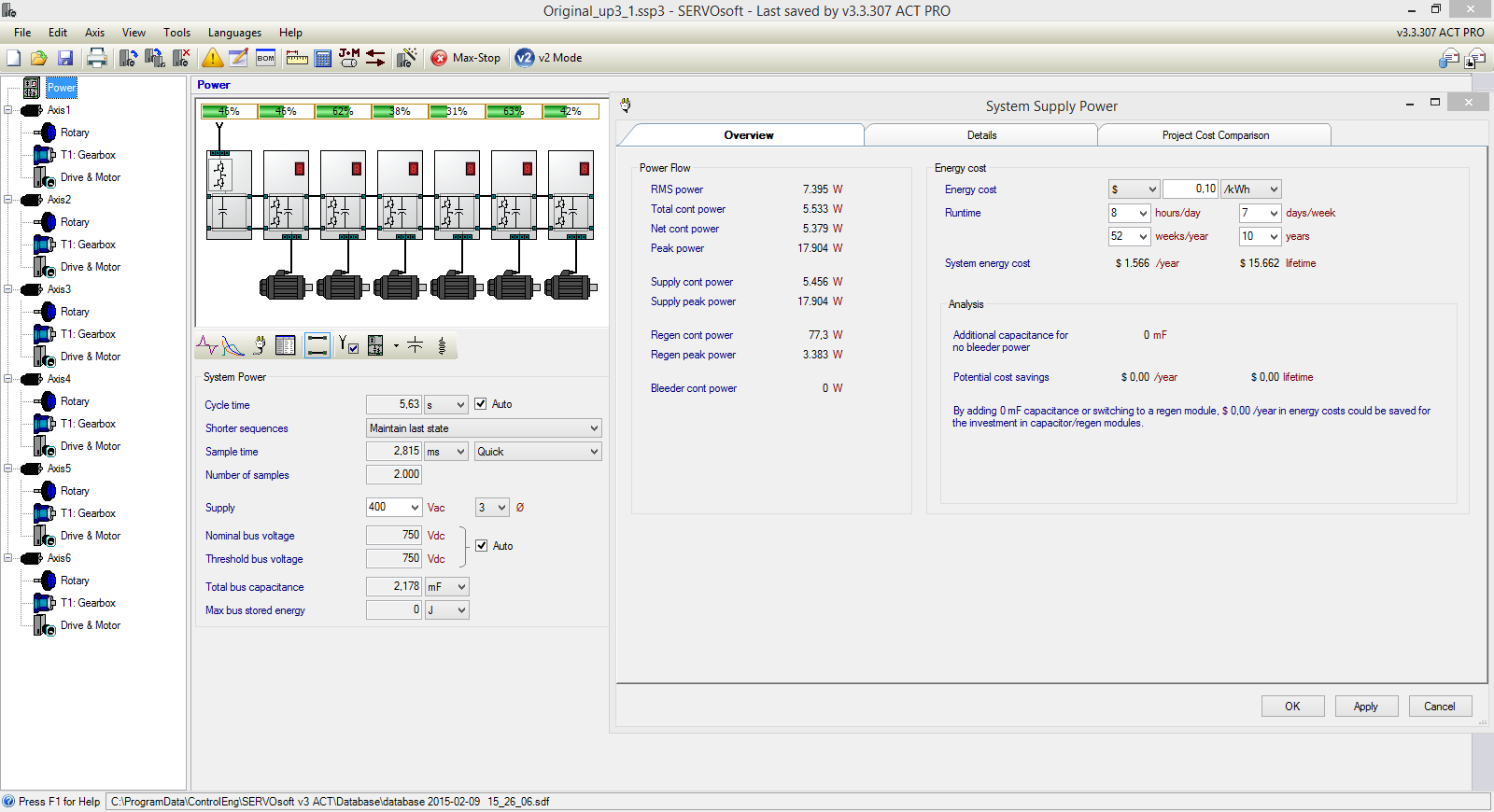
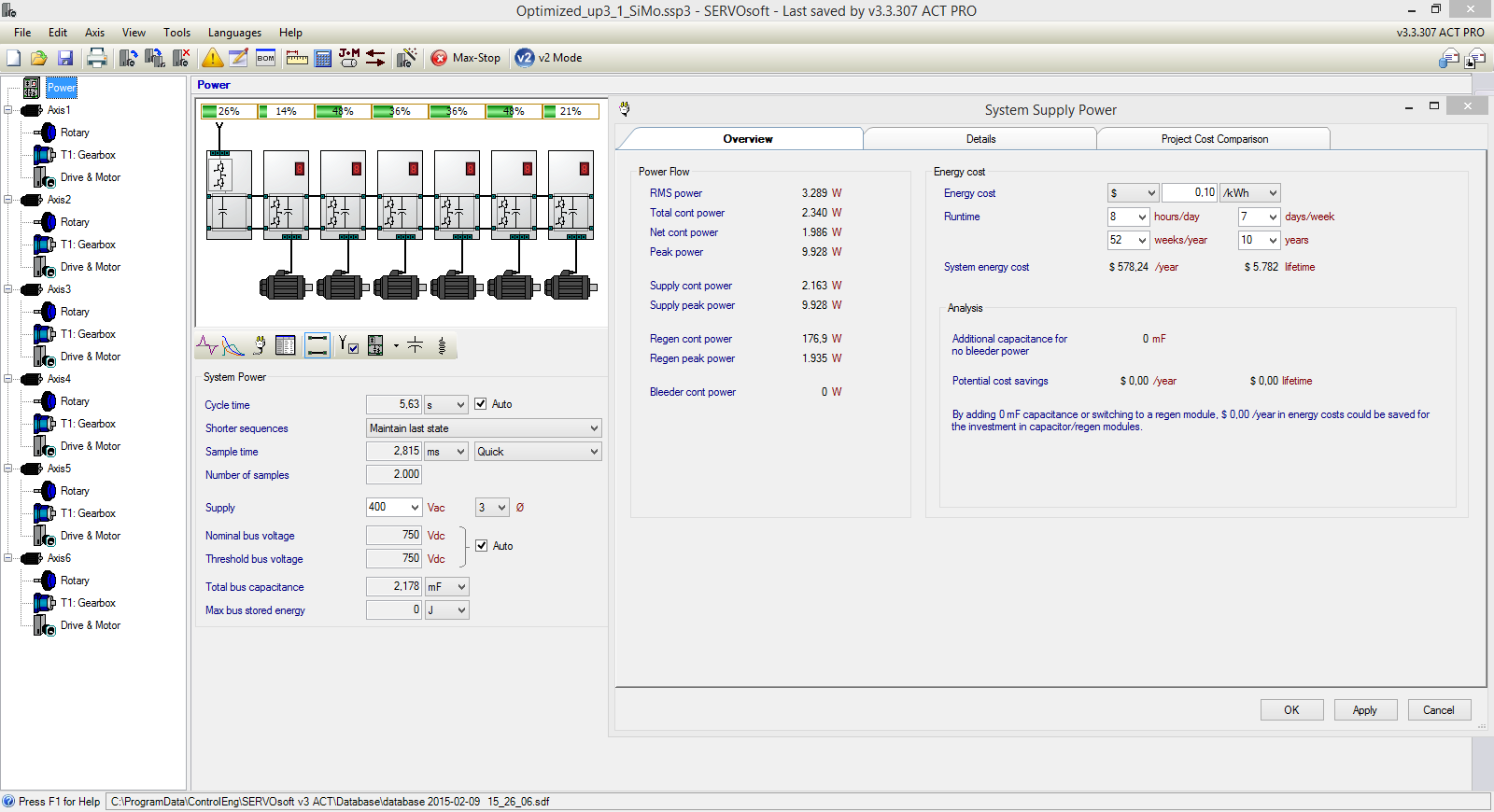
And as you can see below, not only the peak power but also the total burden on the robot axes is significantly reduced in addition to the energy and cost saving effect.
Analysis of manually created path:
|
Analysis of completely optimized path and standpoint:
|