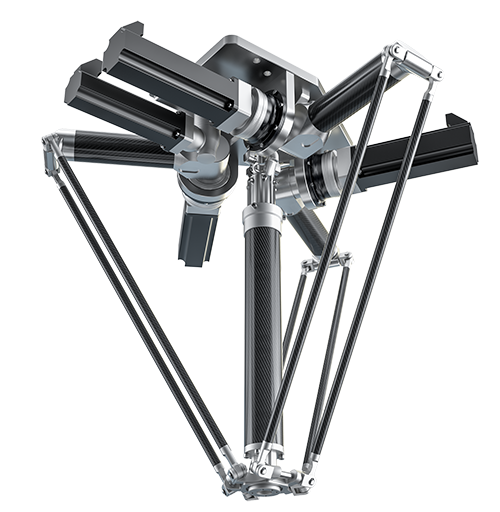
 Delta-type robots are being used more and more because they can perform pick & place tasks very quickly and precisely.
Delta-type robots are being used more and more because they can perform pick & place tasks very quickly and precisely.
But how can you determine the best possible cycle time for each customers need?
In order not to actually test this after the setup of the robot, a physical simulation is required. We have implemented a simple method with our partners WEISS Group and ControlEng Corporation.
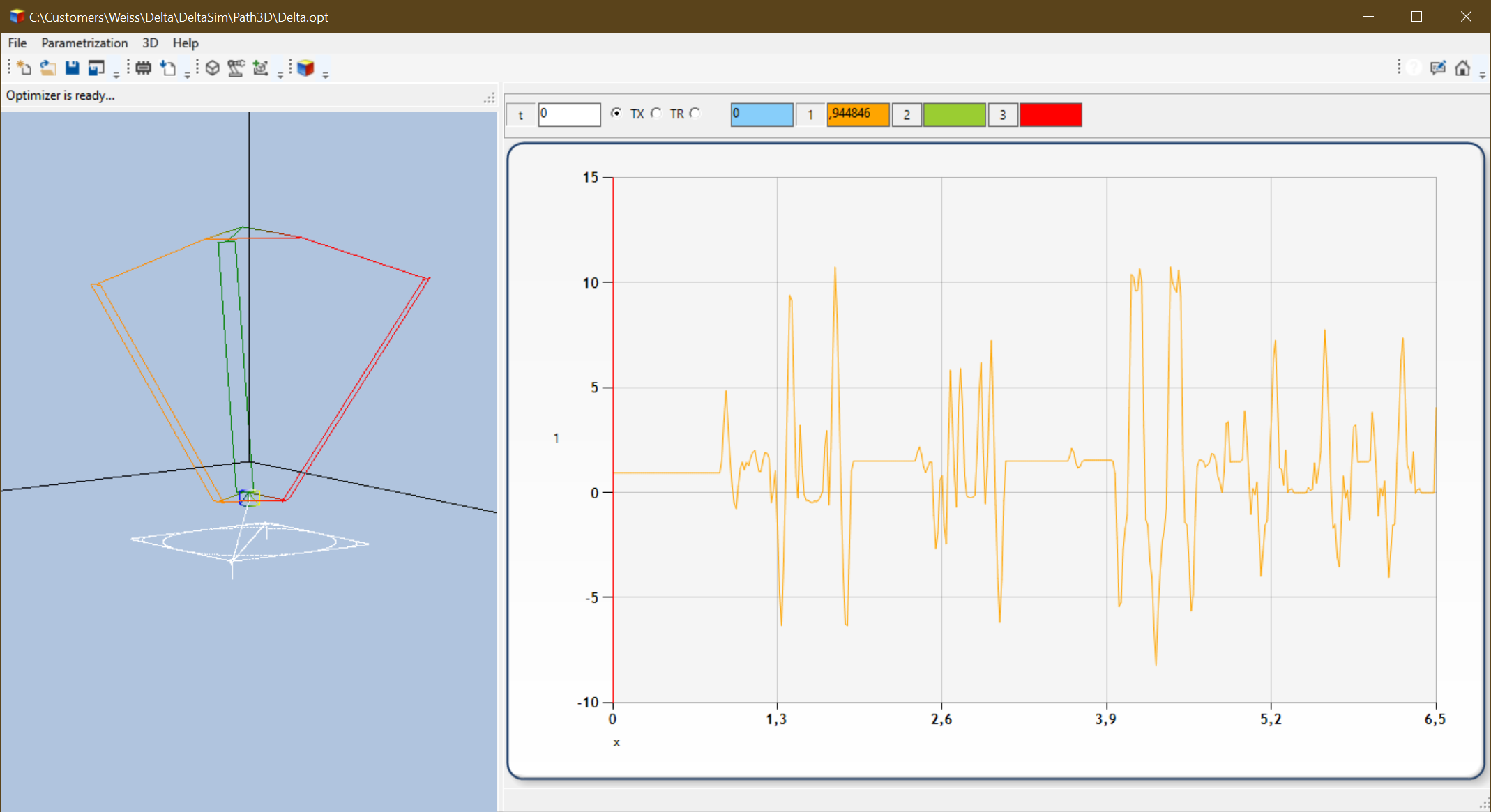
For the Delta Robot DR series from the WEISS Group a simulation and optimization tool was developed.
Using this tool, the delta robots can be moved in such a way that the cycle times can be optimized for the specific application, taking into account the kinematics and dynamics.
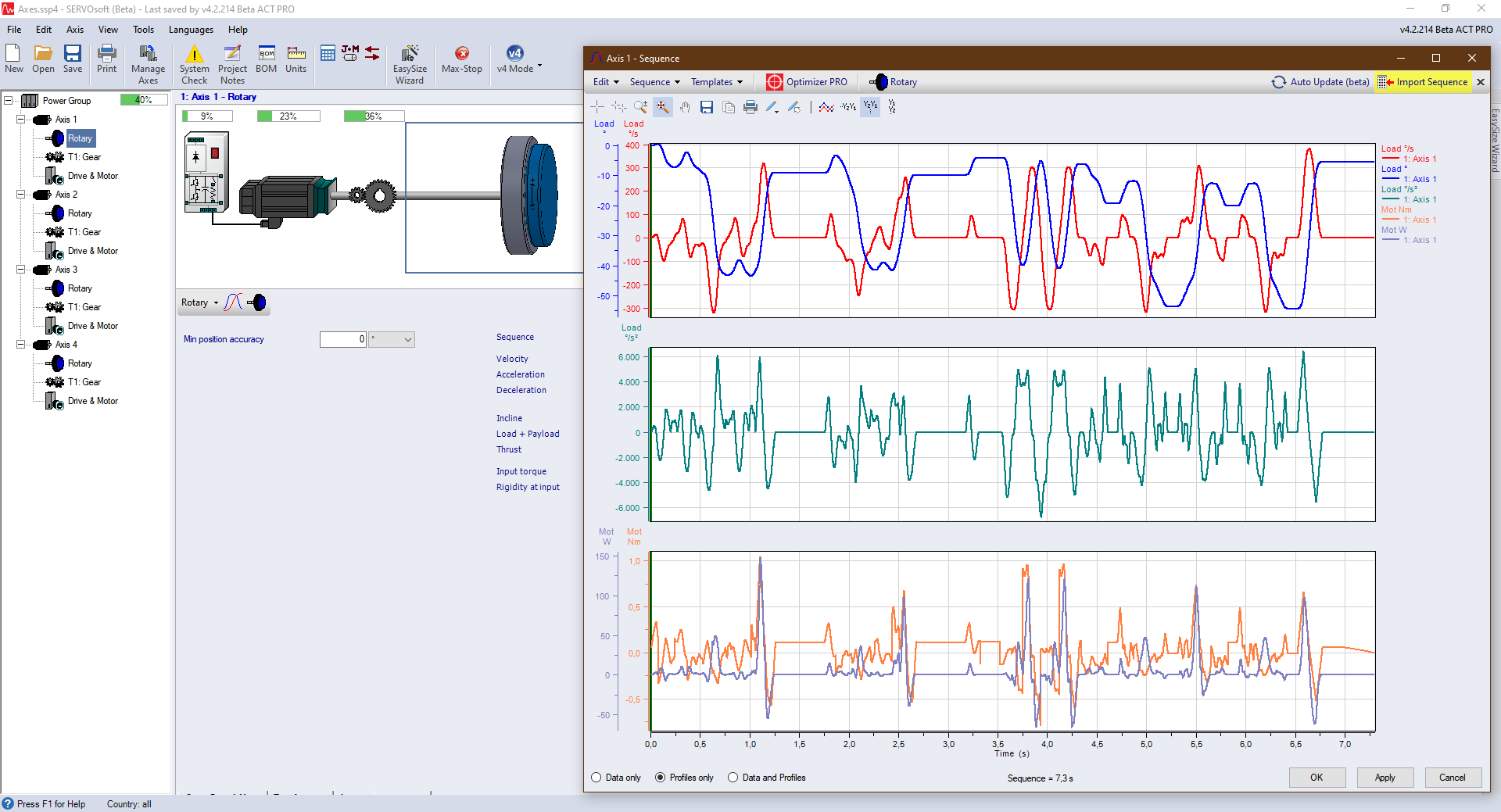
The SERVOsoft® Command Line Interface Option for external optimization tools and the Optimizer PRO Auto Update feature now allows you to evaluate the delta robot’s multi-axis physical model under different conditions.
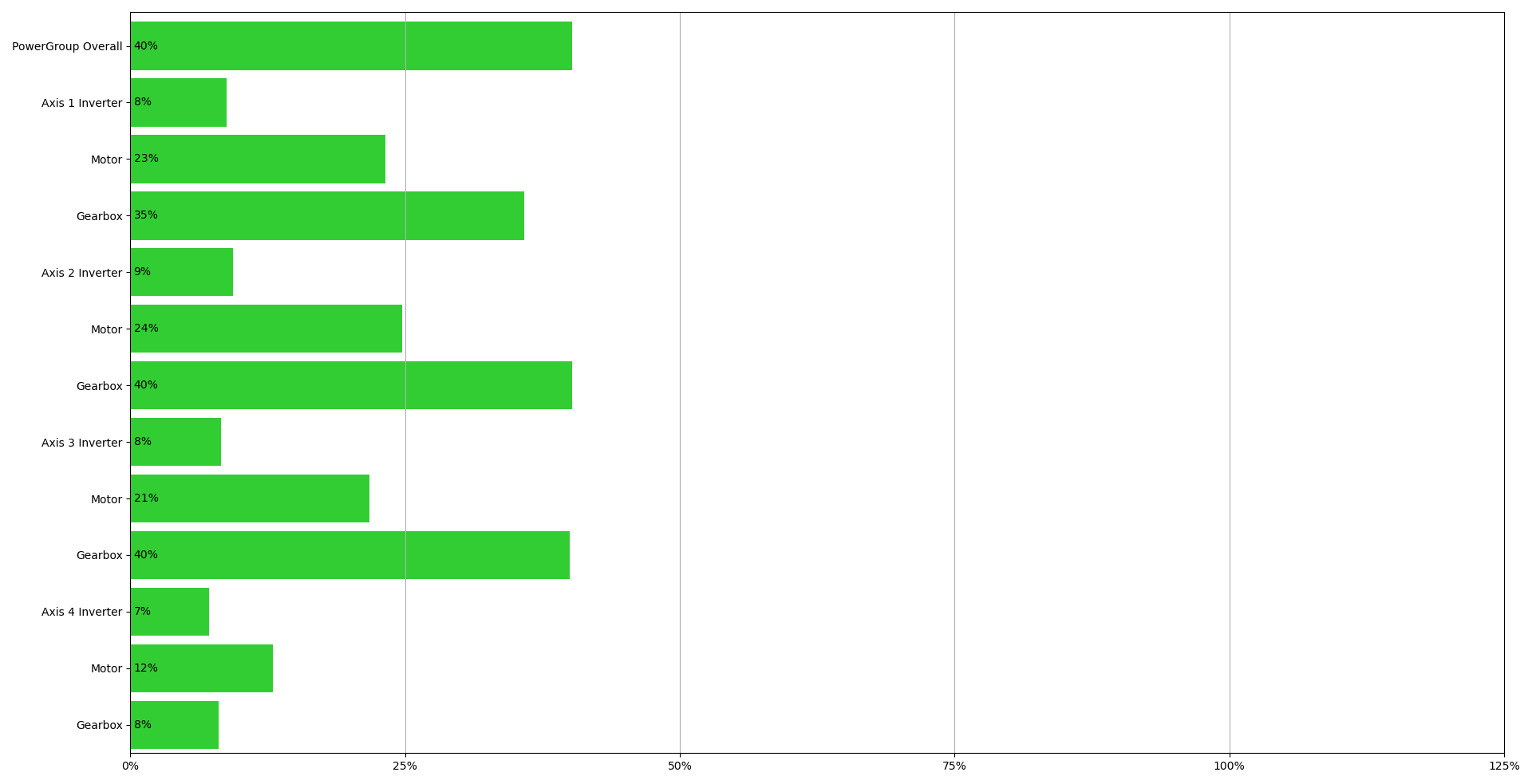
SERVOsoft® evaluates the entire powertrain in each optimization step, which specifies the mechanical model, and makes the results available so that physical simulations of delta robots can easily be achieved.