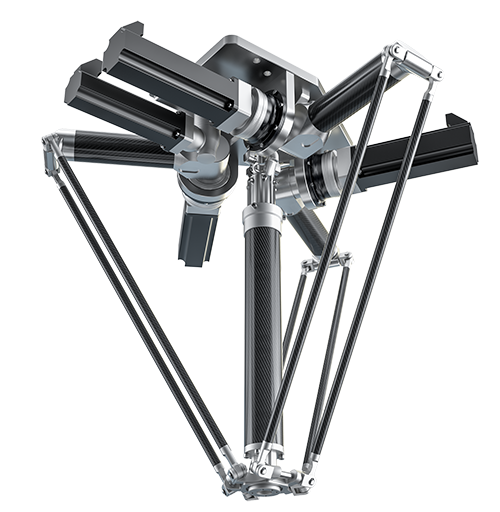
 Roboter vom Typ Delta werden immer mehr eingesetzt, da sie Pick&Place-Aufgaben sehr schnell und präzise durchführen können.
Roboter vom Typ Delta werden immer mehr eingesetzt, da sie Pick&Place-Aufgaben sehr schnell und präzise durchführen können.
Aber wie kann man die bestmögliche Zykluszeit kundenspezifisch bestimmen?
Um das nicht jedesmal nach Aufbau des Roboters real zu testen bedarf es einer physikalischen Simulation. Eine einfache Methode haben wir mit unseren Partnern, der WEISS Gruppe und der ControlEng Corporation realisiert.
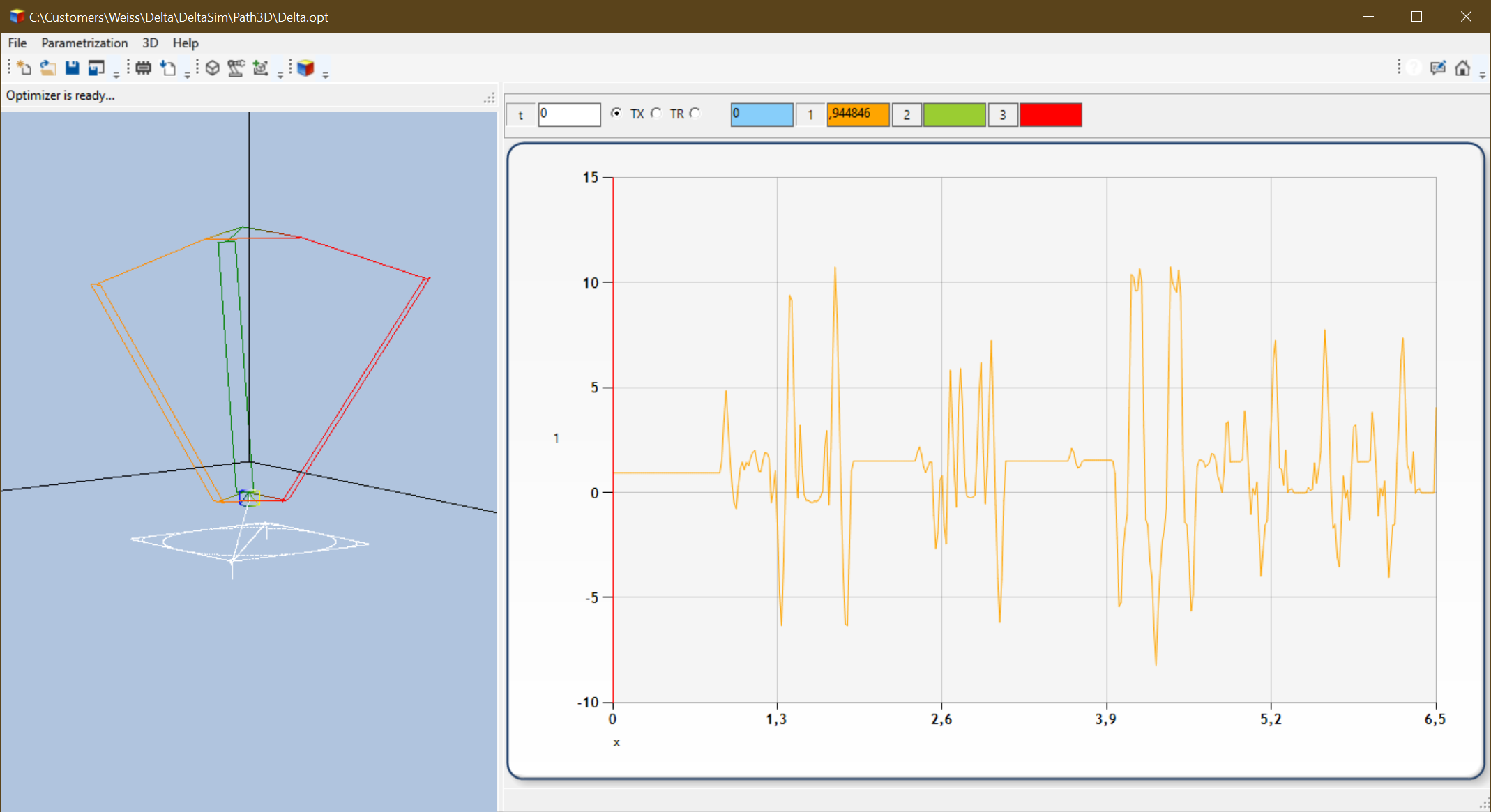
Für die Delta Roboter DR-Reihe der WEISS Gruppe wurde ein Simulations- und Optimierungstool entwickelt.
Mittels dieses Tools lassen sich die Delta-Roboter so bewegen, dass die Taktzeiten applikationsspezifisch unter Berücksichtigung der Kinematik und Dynamik optimiert werden können.
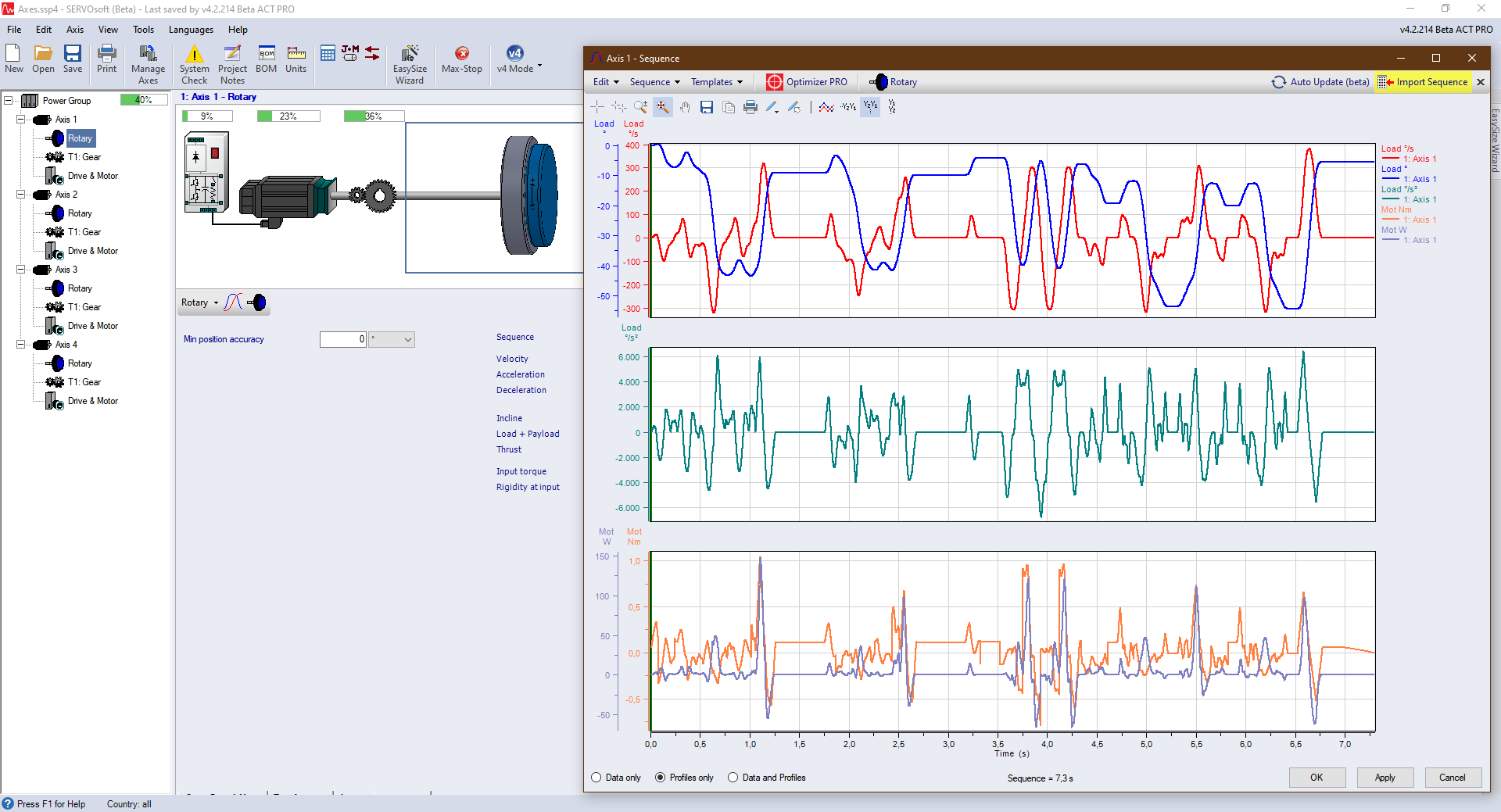
Mithilfe der Command Line Interface Option für externe Optimierungstools und des Optimizer PRO Auto Update Features in SERVOsoft® gibt es jetzt die Möglichkeit, das physikalische Mehrachs-Modell des Delta-Roboters bei unterschiedlichen Bedingungen zu evaluieren.
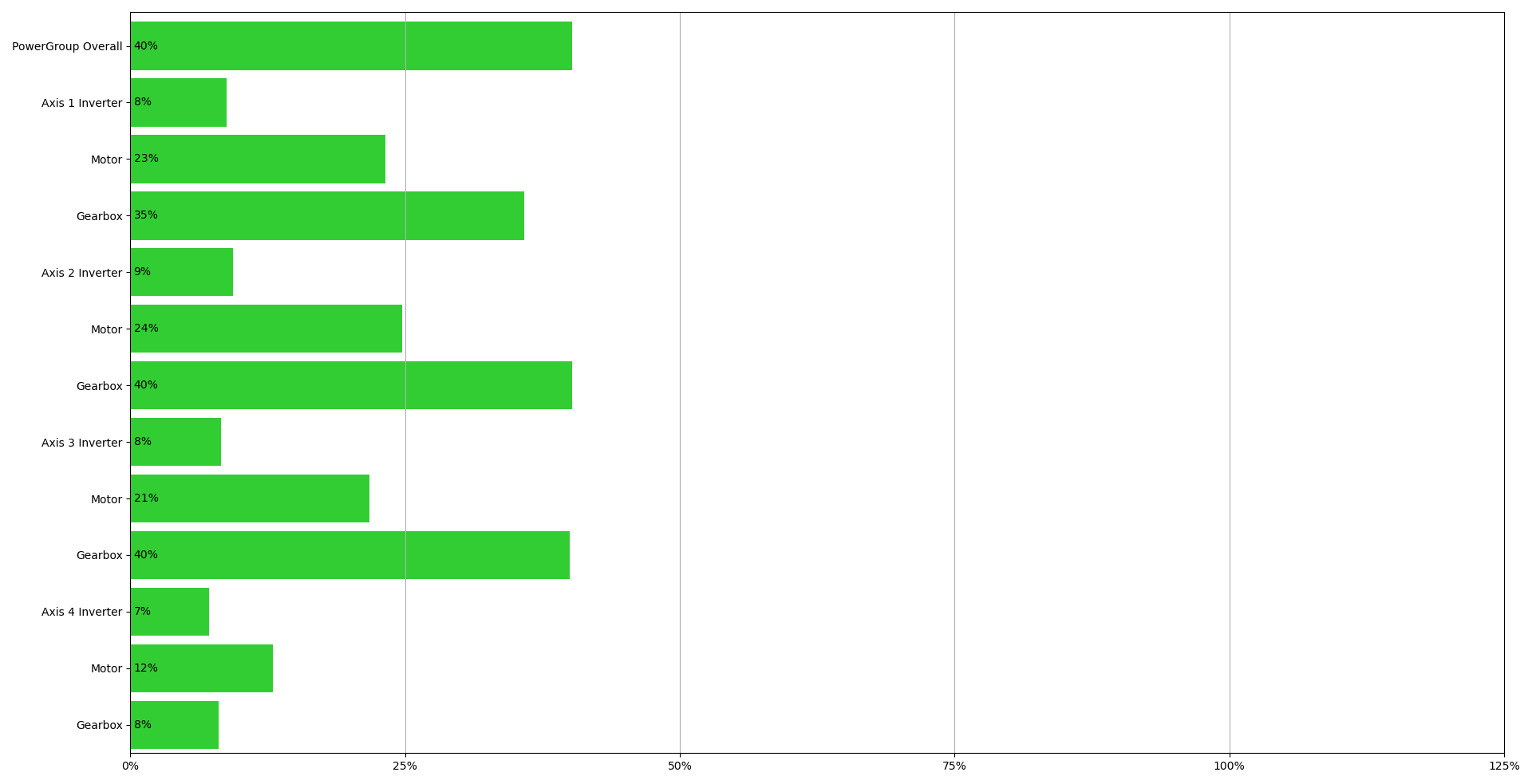
Dabei wertet SERVOsoft® in jedem Optimierungsschritt, welcher das mechanische Modell vorgibt, den kompletten Antriebsstrang aus und stellt die Ergebnisse zur Verfügung, sodass sich einfach physikalische Simulationen des Delta-Roboters realisieren lassen.