We teach robots to move elegantly, almost gracefully. But not only that, we lead them to playfully fulfil their production tasks and to use as little energy as possible.
We have a lot of freedom, from the standpoint of the robot to the path interpolation points and the type of path to robot dynamics on the path. And all these freedoms we use. Starting from a manually programmed point-to-point or already path optimized movement, we can for example shake about the interpolation points or let automatically and simultaneously detect, where the robot should be placed best.
If necessary, the movement can transform into a soft spline path and be optimized with appropriate ramps. In our software, this is all done by simply clicking a ‘Path’ checkbox.
 Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube. PGRpdiBjbGFzcz0iX2JybGJzLWZsdWlkLXdpZHRoLXZpZGVvLXdyYXBwZXIiPjxpZnJhbWUgd2lkdGg9IjU2MCIgaGVpZ2h0PSIzMTUiIHNyYz0iaHR0cHM6Ly93d3cueW91dHViZS1ub2Nvb2tpZS5jb20vZW1iZWQvTTRzeGltRUh1V0k/cmVsPTAmYW1wO3ZxPWhkMTA4MCIgZnJhbWVib3JkZXI9IjAiIGFsbG93PSJhdXRvcGxheTsgZW5jcnlwdGVkLW1lZGlhIiBhbGxvd2Z1bGxzY3JlZW49IiI+PC9pZnJhbWU+PC9kaXY+ |
The upper video illustrates how an increasingly softer elegant path movement emerges. In the lower video, which shows the total power consumption of the robot and its six individual axes, it looks very nice as the power demand is progressively reducing. And far less than half the energy is required then.
|
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube. PGRpdiBjbGFzcz0iX2JybGJzLWZsdWlkLXdpZHRoLXZpZGVvLXdyYXBwZXIiPjxpZnJhbWUgd2lkdGg9IjU2MCIgaGVpZ2h0PSIzMTUiIHNyYz0iaHR0cHM6Ly93d3cueW91dHViZS1ub2Nvb2tpZS5jb20vZW1iZWQvUE1lUzFRQmhNT2s/cmVsPTAmYW1wO3ZxPWhkMTA4MCIgZnJhbWVib3JkZXI9IjAiIGFsbG93PSJhdXRvcGxheTsgZW5jcnlwdGVkLW1lZGlhIiBhbGxvd2Z1bGxzY3JlZW49IiI+PC9pZnJhbWU+PC9kaXY+ |
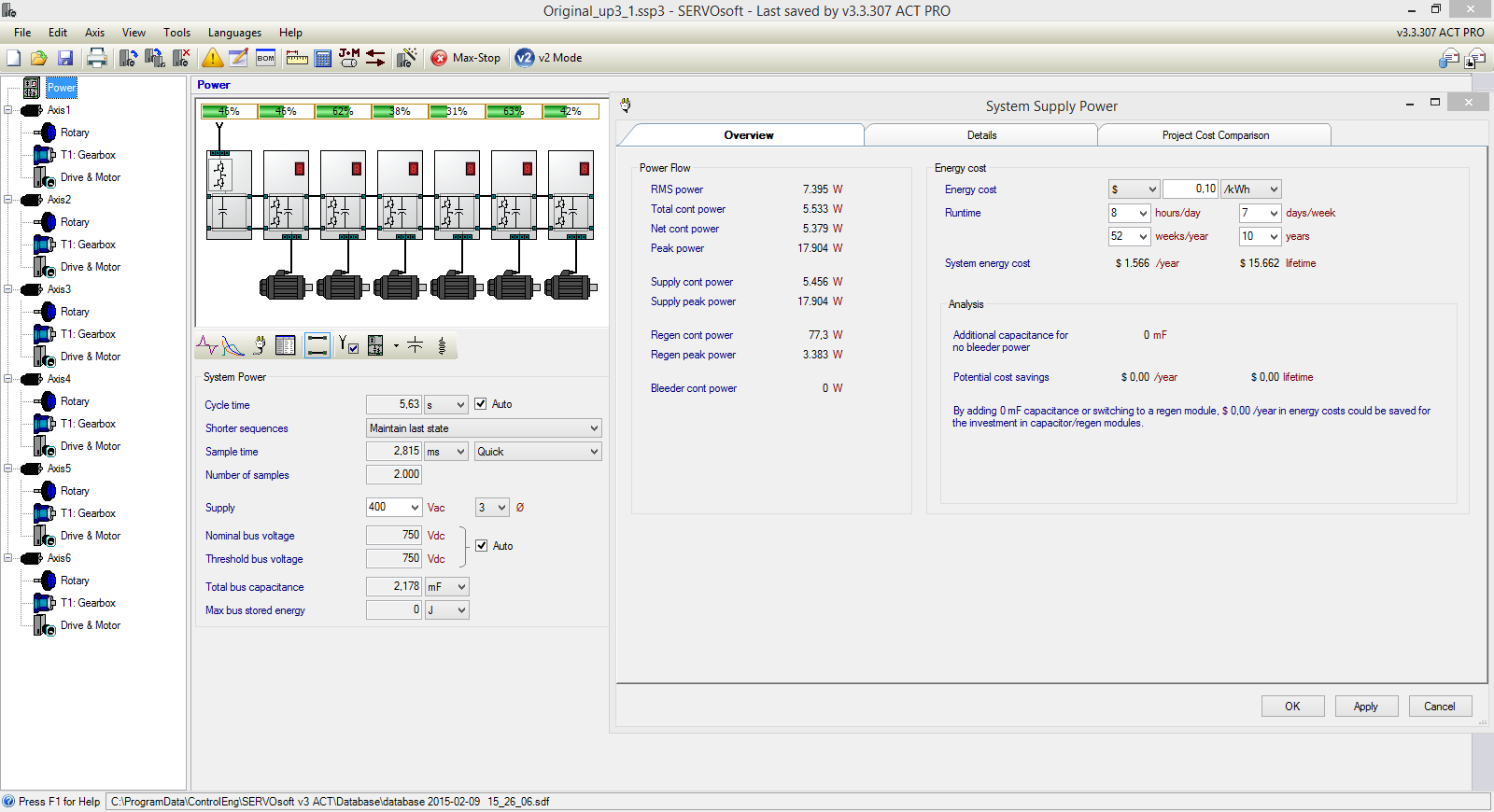
And as you can see below, not only the peak power but also the total burden on the robot axes is significantly reduced in addition to the energy and cost saving effect.
Analysis of manually created path:
 |
Analysis of completely optimized path and standpoint:
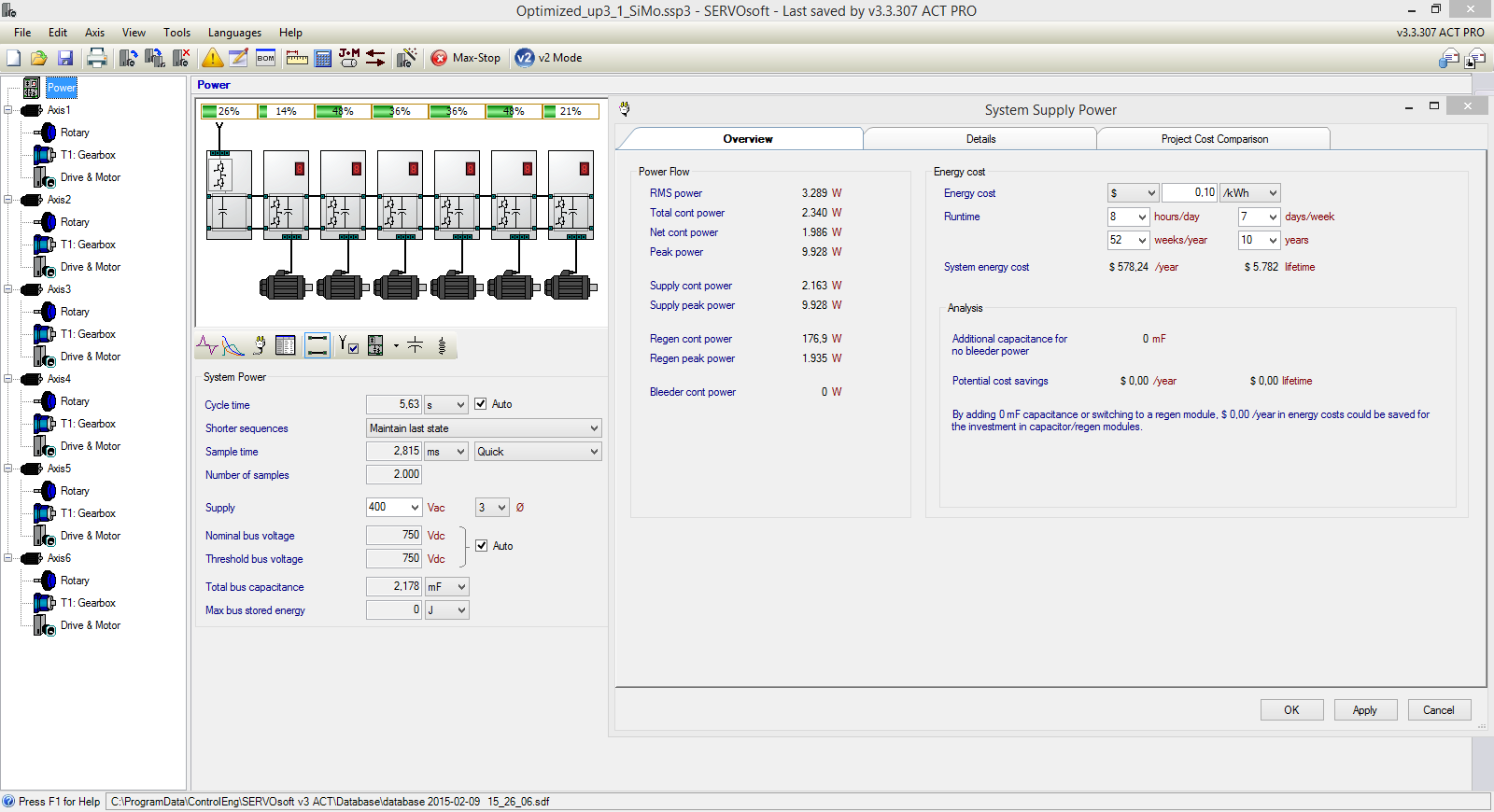 |
What is needed now is only a suitable collision monitoring during optimization. And if then computationally intensive processes might occur, we use specially tailored algorithms if needed. By the way the very good final results remain unchallenged.