Wir bringen Robotern bei, sich elegant, ja fast schon anmutig zu bewegen. Aber nicht nur das, wir bringen sie dazu, spielerisch ihre Produktionsaufgaben zu erledigen und dabei so wenig Energie wie möglich zu benötigen.
Wir haben hier sehr viele Freiheiten, vom Standpunkt des Roboters über die Bahnstützpunkte und die Art der Bahn bis hin zur Roboterdynamik auf der Bahn. Und alle diese Freiheiten nutzen wir. Ausgehend von einer händisch programmierten Punkt-zu-Punkt- oder schon pfadoptimierten Bewegung können wir z.B. an den Bahnstützpunkten rütteln oder gleichzeitig automatisch ermitteln, wo denn der Roboter am besten aufgestellt werden sollte.
Bei Bedarf kann die Bewegung in eine weiche Spline-Bahn verwandelt und mit den entsprechenden Rampen optimiert werden. In unserer Software geschieht dies alles durch einfaches Anklicken eines „Path“-Häkchens.
 Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube. PGlmcmFtZSB3aWR0aD0iNTYwIiBoZWlnaHQ9IjMxNSIgc3JjPSJodHRwczovL3d3dy55b3V0dWJlLW5vY29va2llLmNvbS9lbWJlZC9NNHN4aW1FSHVXST9yZWw9MCZhbXA7dnE9aGQxMDgwIiBmcmFtZWJvcmRlcj0iMCIgYWxsb3c9ImF1dG9wbGF5OyBlbmNyeXB0ZWQtbWVkaWEiIGFsbG93ZnVsbHNjcmVlbj0iIj48L2lmcmFtZT4= |
Das obere Video verdeutlicht, wie sich eine immer weicher werdende elegante Bahnbewegung herauskristallisiert. Im unteren Videos, welche die Gesamtleistungsaufnahme des Roboters und seiner sechs Einzelachsen zeigt, sieht man sehr schön wie der Leistungsbedarf zunehmend reduziert wird, was in einen weit weniger als halben Energiebedarf mündet.
|
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube. PGlmcmFtZSB3aWR0aD0iNTYwIiBoZWlnaHQ9IjMxNSIgc3JjPSJodHRwczovL3d3dy55b3V0dWJlLW5vY29va2llLmNvbS9lbWJlZC9QTWVTMVFCaE1Paz9yZWw9MCZhbXA7dnE9aGQxMDgwIiBmcmFtZWJvcmRlcj0iMCIgYWxsb3c9ImF1dG9wbGF5OyBlbmNyeXB0ZWQtbWVkaWEiIGFsbG93ZnVsbHNjcmVlbj0iIj48L2lmcmFtZT4= |
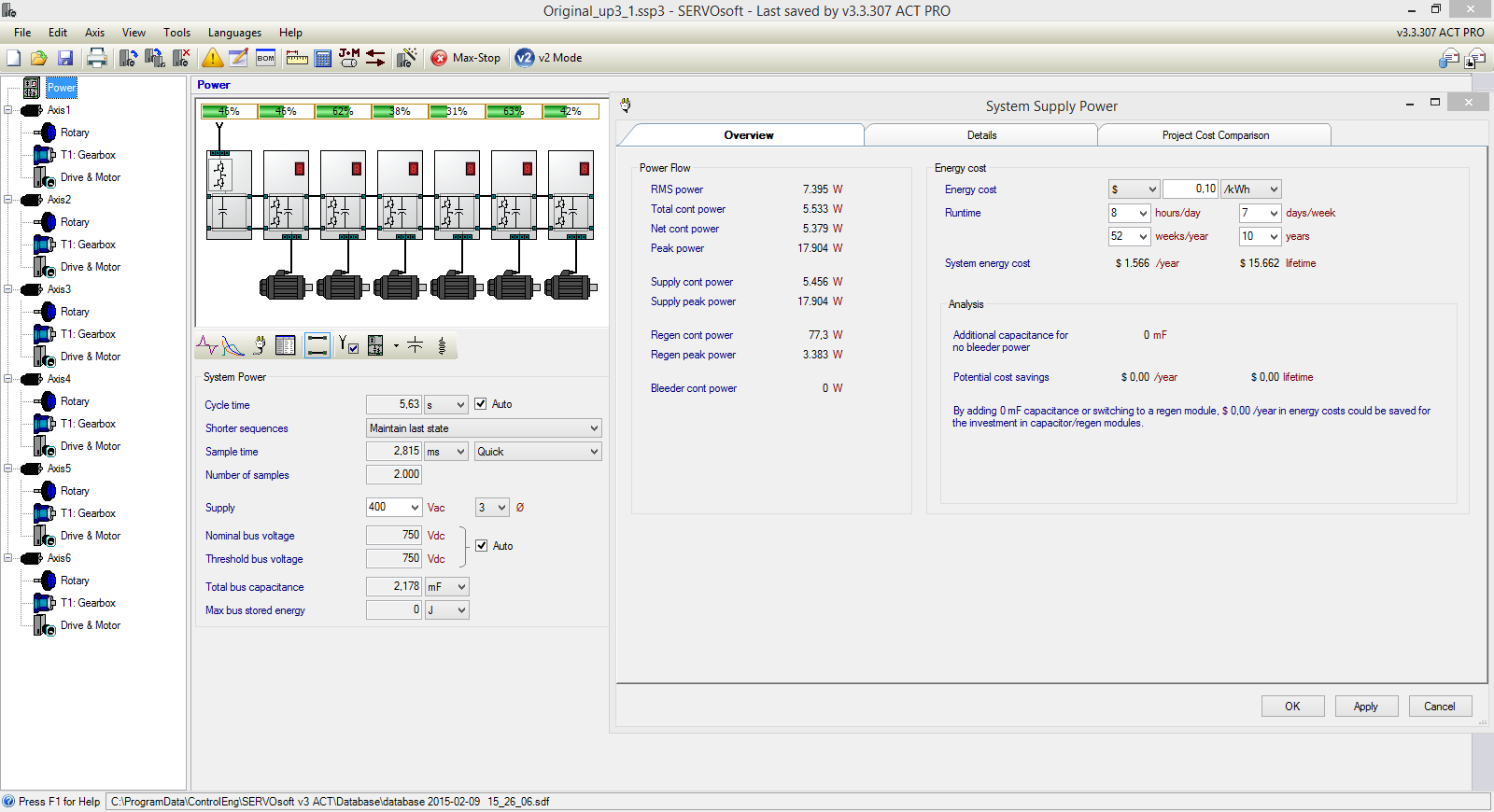
Und wie man unten sehen kann wird neben dem Energie- und Kostenspareffekt nicht nur die benötigte Spitzenleistung sondern auch die Gesamtbelastung der Roboterachsen deutlich verringert.
Analyse des manuell erstellten Pfads:
 |
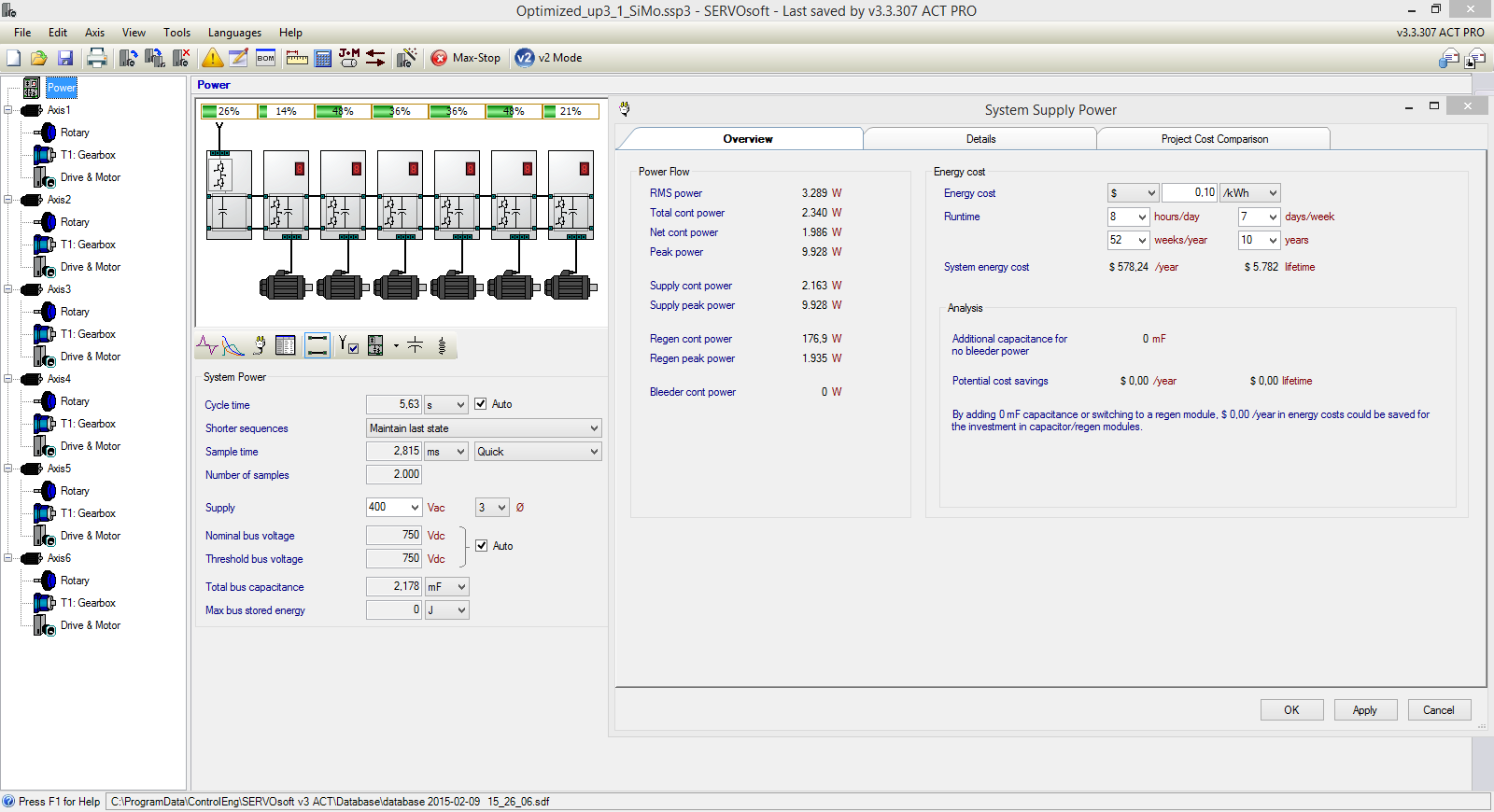
Analyse des komplett durchoptimierten Pfads und Standpunkts:
 |
Benötigt wird jetzt nur noch eine geeignete Kollisionsüberwachung während der Optimierung. Und bei dort etwaig auftretenden rechenintensiven Prozessen können wir bei Bedarf gezielt auf speziell darauf zugeschnittene Algorithmen zurückgreifen. Die sehr guten Endergebnisse bleiben allerdings unangefochten.