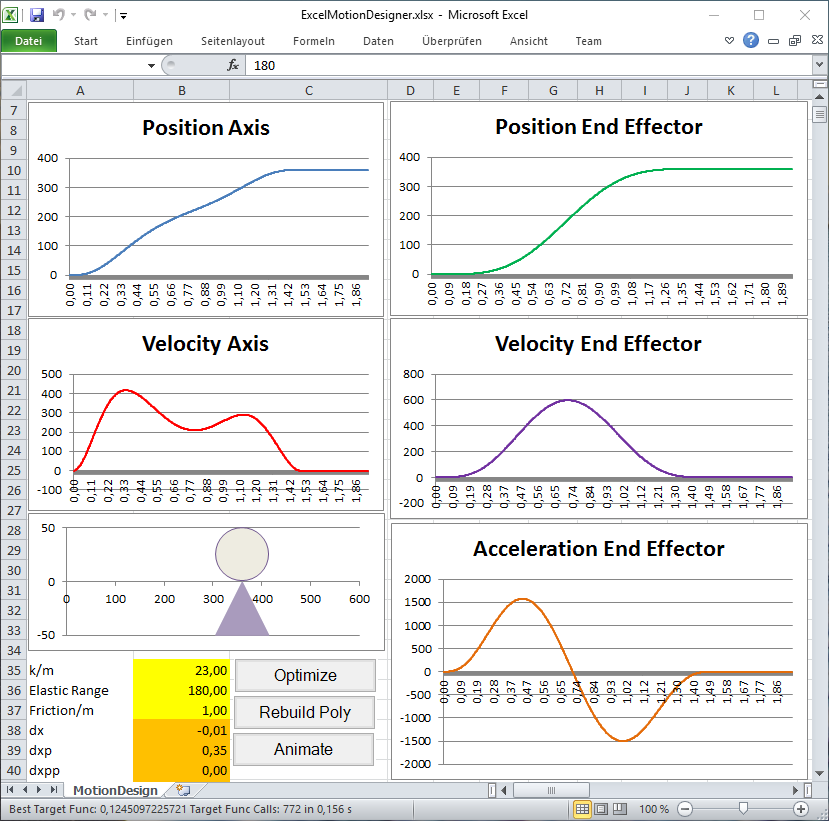
 Polynom-Splines können verwendet werden, um automatisch Gegenschwingungen zu erzeugen und dadurch eine Endeffektorschwingung zu dämpfen.
Polynom-Splines können verwendet werden, um automatisch Gegenschwingungen zu erzeugen und dadurch eine Endeffektorschwingung zu dämpfen.
Im Beispiel unten beschreiben der Endeffektor (durch den Kreis angedeutet) und die Antriebsachse (durch das Dreieck angedeutet) ein schwingungsfähiges System.
 Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube. PGlmcmFtZSB3aWR0aD0iNTYwIiBoZWlnaHQ9IjMxNSIgc3JjPSJodHRwczovL3d3dy55b3V0dWJlLW5vY29va2llLmNvbS9lbWJlZC9IRzJub3RndEdFND9yZWw9MCZhbXA7dnE9aGQxMDgwIiBmcmFtZWJvcmRlcj0iMCIgYWxsb3c9ImF1dG9wbGF5OyBlbmNyeXB0ZWQtbWVkaWEiIGFsbG93ZnVsbHNjcmVlbj0iIj48L2lmcmFtZT4= |
Das Video veranschaulicht an zwei unterschiedlichen Schwingungsverhältnissen, wie unsere Optimierungsroutinen automatisch einen Polynom-Spline für die Bewegung der Antriebsachse ermitteln, sodass sich diese mit dem Schwingverhalten des Endeffektors synchronisiert und es dadurch sehr stark dämpft. So wird erreicht, dass am Ende der Positionierung Antriebsachse und Endeffektor gleichzeitig zum Stillstand kommen.
Mit dieser Methode können sehr flexibel auftretende Schwingungen, z.B. bei handzuhabenden Flüssigkeiten oder elastischen Endeffektoren, gedämpft oder sogar eliminiert werden. Zudem lassen sich Polynom-Splines auf jedem gängigen Motion-Control-System als Kurvenscheiben einfach abbilden, sodass kein spezielles Betriebssystem nötig ist.
|
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube. PGlmcmFtZSB3aWR0aD0iNTYwIiBoZWlnaHQ9IjMxNSIgc3JjPSJodHRwczovL3d3dy55b3V0dWJlLW5vY29va2llLmNvbS9lbWJlZC8tN2NVMTBxV1JDOD9yZWw9MCZhbXA7dnE9aGQxMDgwIiBmcmFtZWJvcmRlcj0iMCIgYWxsb3c9ImF1dG9wbGF5OyBlbmNyeXB0ZWQtbWVkaWEiIGFsbG93ZnVsbHNjcmVlbj0iIj48L2lmcmFtZT4= Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube. PGlmcmFtZSBsb2FkaW5nPSJsYXp5IiB3aWR0aD0iNTYwIiBoZWlnaHQ9IjMxNSIgc3JjPSJodHRwczovL3d3dy55b3V0dWJlLW5vY29va2llLmNvbS9lbWJlZC9PZnoycUIyS05zWT9yZWw9MCZhbXA7dnE9aGQxMDgwIiBmcmFtZWJvcmRlcj0iMCIgYWxsb3c9ImF1dG9wbGF5OyBlbmNyeXB0ZWQtbWVkaWEiIGFsbG93ZnVsbHNjcmVlbj0iIj48L2lmcmFtZT4= |