Bei der Verringerung des Energieverbrauchs eines Roboters können wir die Roboterbahn optimieren. Das bringt schon Einsparungen im zweistelligen Prozentbereich.
 Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube. PGlmcmFtZSB3aWR0aD0iNTYwIiBoZWlnaHQ9IjMxNSIgc3JjPSJodHRwczovL3d3dy55b3V0dWJlLW5vY29va2llLmNvbS9lbWJlZC9uN0ZlZzNMRUkzZz9yZWw9MCYjMDM4O3ZxPWhkMTA4MCIgZnJhbWVib3JkZXI9IjAiIGFsbG93PSJhdXRvcGxheTsgZW5jcnlwdGVkLW1lZGlhIiBhbGxvd2Z1bGxzY3JlZW4+PC9pZnJhbWU+ |
Falls die Roboterbahn aber nicht veränderbar sein sollte, können wir uns immer noch überlegen, vielleicht den Roboter woanders hinzustellen. Das bringt auch Einsparungen im zweistelligen Prozentbereich.
|
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube. PGlmcmFtZSB3aWR0aD0iNTYwIiBoZWlnaHQ9IjMxNSIgc3JjPSJodHRwczovL3d3dy55b3V0dWJlLW5vY29va2llLmNvbS9lbWJlZC9uMXpLR1pQUGlGRT9yZWw9MCYjMDM4O3ZxPWhkMTA4MCIgZnJhbWVib3JkZXI9IjAiIGFsbG93PSJhdXRvcGxheTsgZW5jcnlwdGVkLW1lZGlhIiBhbGxvd2Z1bGxzY3JlZW4+PC9pZnJhbWU+ |
Haben wir sowohl Freiheiten bei der Roboterbahn als auch beim Roboterstandpunkt, dann haben wir die Chance, den Energieverbrauch sogar zu halbieren.
|
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube. PGlmcmFtZSB3aWR0aD0iNTYwIiBoZWlnaHQ9IjMxNSIgc3JjPSJodHRwczovL3d3dy55b3V0dWJlLW5vY29va2llLmNvbS9lbWJlZC9Ual83UFZGd2dsQT9yZWw9MCYjMDM4O3ZxPWhkMTA4MCIgZnJhbWVib3JkZXI9IjAiIGFsbG93PSJhdXRvcGxheTsgZW5jcnlwdGVkLW1lZGlhIiBhbGxvd2Z1bGxzY3JlZW4+PC9pZnJhbWU+ |
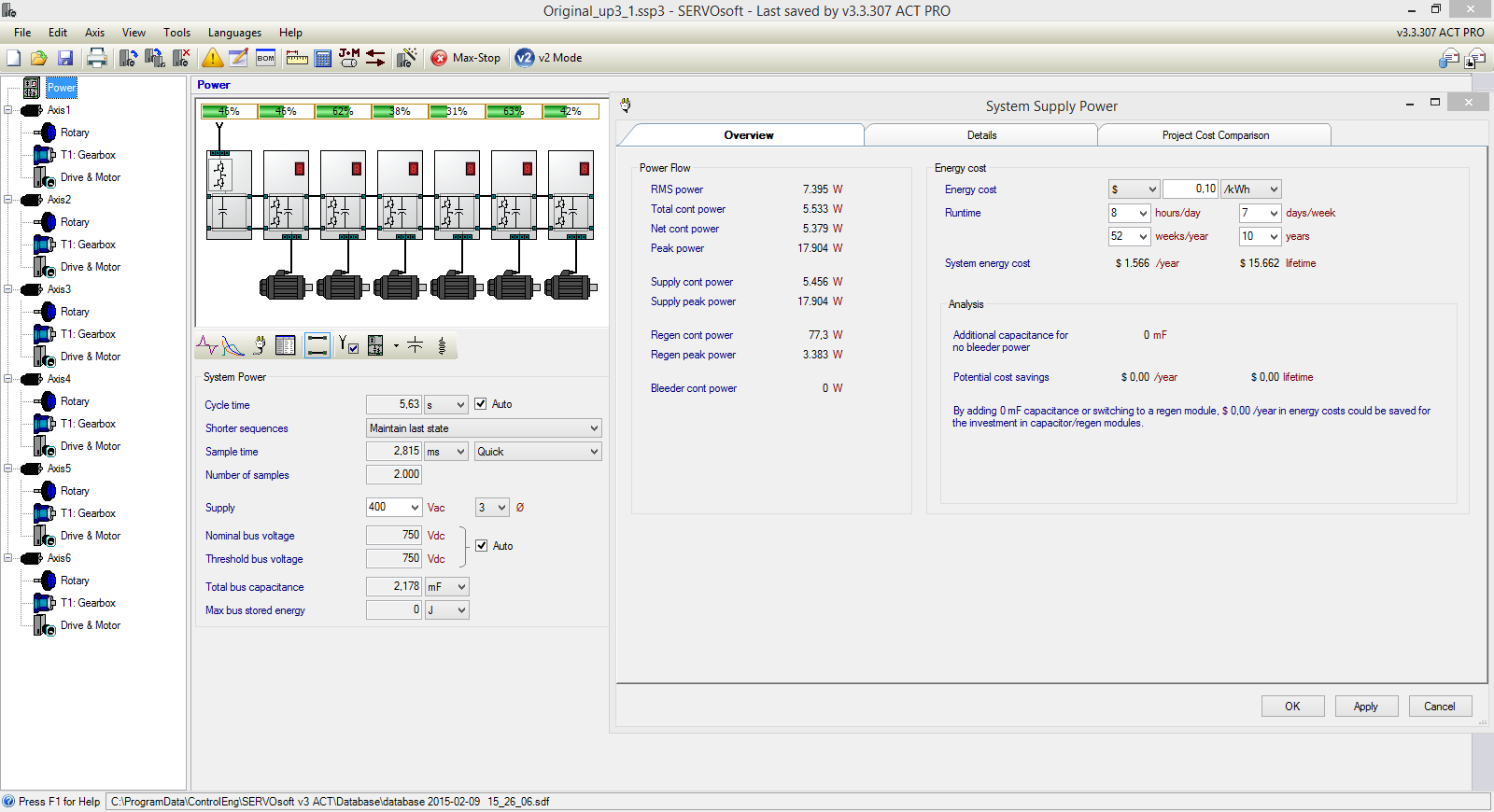
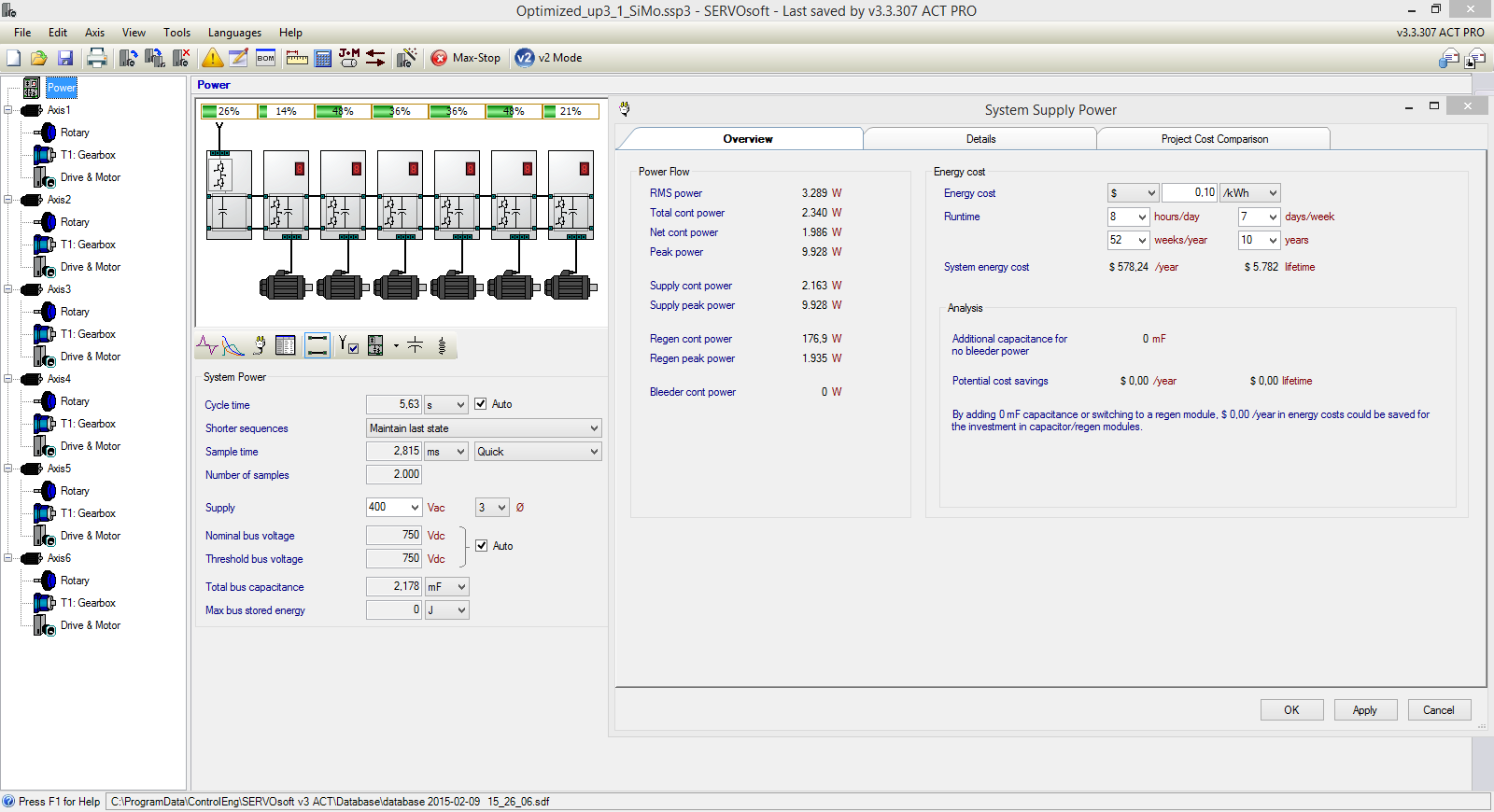
Und wie man unten sehen kann wird neben dem Energie- und Kostenspareffekt nicht nur die benötigte Spitzenleistung sondern auch die Gesamtbelastung der Roboterachsen deutlich verringert.
Analyse des manuell erstellten Pfads:
|
Analyse des komplett durchoptimierten Pfads und Standpunkts:
|